การออกแบบหุ่นยนต์นักเตะ
การออกแบบหุ่นยนต์ที่ทำงานโดยอัตโนมัติ ต้องใช้เทคโนโลยีทางด้านปัญญาประดิษฐ์ที่ทดสอบภายใต้กฎเกณฑ์ที่ชัดเจนและง่ายต่อการสื่อสาร กติกาของฟุตบอลเหมาะสำหรับใช้ในการทดสอบนี้ และยังดึงดูดความสนใจได้อีกด้วย
การแข่งขัน RoboCup เริ่มขึ้นเมื่อทศวรรศ 1990 เพื่อเป็นสนามทดสอบงานวิจัยของสถาบันการศึกษาต่างๆ โดยในการแข่งขันจะใช้กติการของ FIFA อย่างเคร่งครัด โดยจัดประเภทเป็น Humanoid, Middle Size, Simulation, Small Size และ Standard Platform จุดประสงค์ไม่ใช่การแข่งฟุตบอล แต่เพื่อการออกแบบหุ่นยนต์ที่ทำงานได้ด้วยตัวเอง สามารถตัดสินใจได้อย่างถูกต้อง ซึ่งการแข่งขันในปัจจุบันเป็นการแข่งขันระหว่างหุ่นยนต์ด้วยกันเอง แต่แผนการสำหรับปี 2050 จะเป็นการแข่งขันระหว่างหุ่นยนต์กับมนุษย์
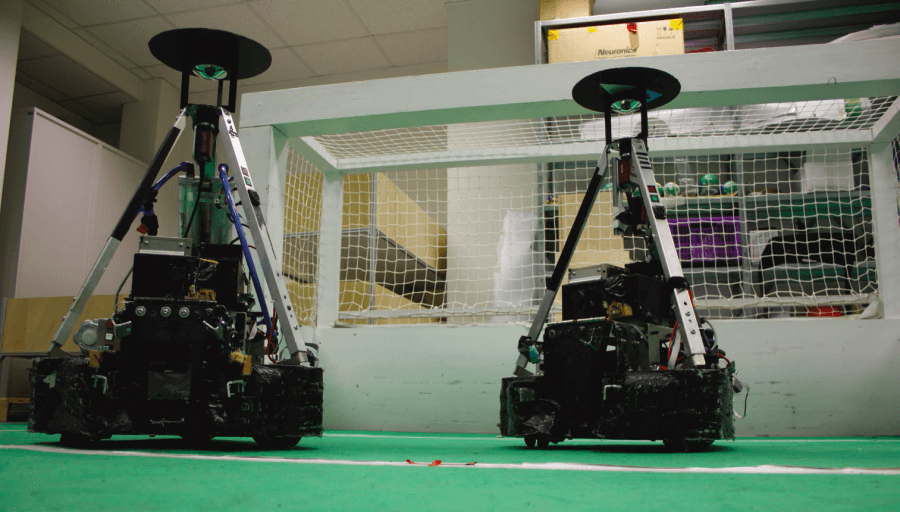
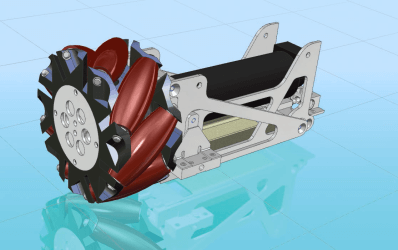
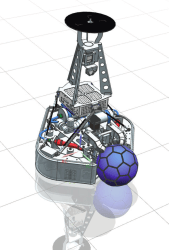
ตั้งแต่ปี 2003 Graz University of Technology ได้เข้าร่วมการแข่งขันหุ่นยนต์ระดับกลางที่ใช้หุ่นยนต์ขนาดเส้นผ่านศูนย์กลางไม่เกิน 50 ซ.ม. และมีความสูงไม่เกิน 80 ซ.ม. จำนวน 6 ตัว เป็นหุ่นยนต์ที่ขับเคลื่อนได้หลายทิศทาง ทำงานได้ด้วยตนเองอย่างสมบูรณ์ สามารถจับสิ่งของได้หลากหลายชนิด และสามารถฟังคำสั่งของกรรมการได้
สามารถแข่งขันระดับกลางได้ดี
ทีมจาก Graz University ที่ใช้ชื่อทีมว่า ‘Mostly Harmless RoboCup Team’ มีสมาชิก 10-15 คนจากหลายคณะที่เข้ามาช่วยกันพัฒนา เพื่อให้ได้ผลลัพท์ที่ต้องการ สมาชิกในทีมต้องทำงานร่วมกันอย่างใกล้ชิด และทำงานภายใต้เวลาที่จำกัด ในการแข่งขัน German Open ในปี 2011 ทีมของ Graz University ได้ที่ 4
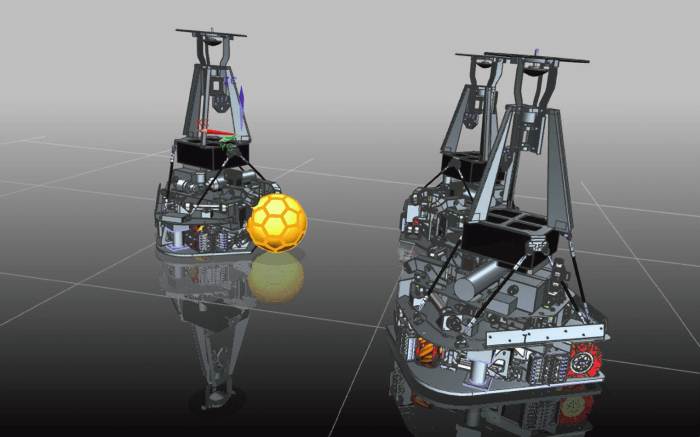
การออกแบบแบบ Molular Design ที่ทำใน Computer ทั้งหมด
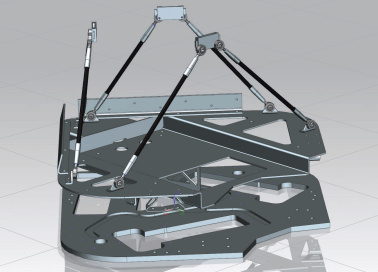
แม้ว่าหุ่นยนต์รุ่นที่ 2 ได้รับการออกแบบให้เป็น Single Unit แต่ในภายหลังก็ตัดสินใจออกแบบหุ่นยนต์รุ่นที่ 3 ที่ชื่อว่า ‘Krikkit’ ให้เป็นแบบ Modular Design โดยระบบ Platform แบบหลายทิศทางเป็นระบบหลักในการสนับสนุนโมดูลอื่นๆ ซึ่งสามารถเพิ่ม ลด โมดูล หรือเปลี่ยนโมดูลที่ดีกว่าได้โดยไม่ยาก


การออกแบบ Kirkkit นี้ทำให้ผู้ออกแบบต้องปรับเปลี่ยนการออกแบบ จากเดิมที่ใช้ 3D CAD ร่วมกับการเขียนแบบด้วยมือ ซึ่ง 3D CAD เดิมต้องใช้เวลาในการเรียนรู้มาก ซึ่งปกติแล้วในทีมมีการเปลี่ยนลูกทีมบ่อย ทำให้จำเป็นต้องหาโปรแกรมใหม่ที่มีความสามารถสูง เรียนรู้ง่าย และสามารถแจกจ่ายงานให้ลูกทีมทำงานต่อได้ง่าย ซึ่งในปี 2009 ทีม Mostly Harmless RoboCup ก็เลือก NX
งานที่ซับซ้อนต้องใช้ซอฟท์แวร์ที่ทรงพลัง
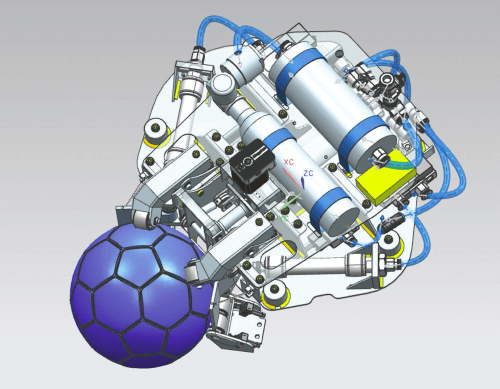
การที่ทีมนำ NX มาแทน CAD ตัวเดิมที่ใช้กันทั่วไปตามสถาบันการศึกษา ก็เนื่องจากพลังที่เหนือกว่าของ NX และ NX CAE ที่เข้ามา Integrated ใน NX ได้อย่างสมบูรณ์ ซึ่งมีความจำเป็นอย่างยิ่งในการออกแบบของทีม หุ่นยนต์ที่ออกแบบมีขนาดค่อนข้างสูง มีความเร็วในการเคลื่อนที่ที่ไม่เป็นสัดส่วนที่เหมาะสม และยังเกิดการสั่นไหวมากในบางครั้ง
การสั่นไหวทำให้ภาพที่ได้จากระบบบันทึกภาพที่อยู่ส่วนบนของหุ่นยนต์ไม่ชัด ทีมจึงใช้ NX Motion ในการตรวจสอบหาข้อมูลของการสั่นไหวที่เกิดจากระบบล้อได้
ข้อมูลที่เป็นหนึ่งเดียวทำให้การทำงานร่วมกันง่ายขึ้น
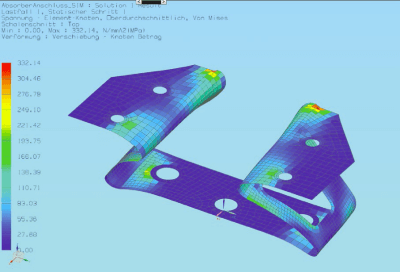
การที่ข้อมูลรวมอยู่เป็นหนึ่งเดียวช่วยให้การทำงานของทีมที่มีการเปลี่ยนลูกทีมบ่อยเป็นเรื่องที่ง่ายขึ้น ซอฟท์แวร์ CAD เดิมที่เคยใช้การรับข้อมูลที่มาจากแหล่งอื่นต้อง Import เข้ามาเป็นไฟล์ STEP นอกจากนั้นการใช้งานซอฟท์แวร์หลายระบบทำให้การจัดการข้อมูลเป็นเรื่องยากและใช้เวลานานเป็นสัปดาห์ งานแบบเดียวกันเมื่อมาทำใน NX ใช้เวลาเพียงวันเดียว โดยเฉพาะในงานวิเคราะห์โครงสร้างซึ่งแต่เดิมทำการวิเคราะห์โดยคร่าวๆ เนื่องจากการวิเคราะห์แบบ Finite Element เต็มรูปแบบใช้เวลานานมาก ซึ่งทีมก็มีความจำเป็นต้อง Optimize โครงสร้างและน้ำหนักอยู่เป็นประจำ แต่ในปัจจุบันทีมมีความสามารถที่จะวิเคราะห์โครงสร้างเพื่อหาทางเลือกที่ดีที่สุดได้เป็นอย่างดี นอกจากนั้นยังช่วยลดเวลาในการ Export ข้อมูลที่เป็นไฟล์ DXF เป็นอย่างมาก ตัวอย่างเช่นการ Export ไฟล์ Assembly ที่มี 500 parts สามารถทำได้เสร็จภายในเวลาไม่ถึงครึ่งวัน
NX ยังช่วยคุมต้นทุนได้
การตัดสินใจด้านงบประมาณที่ใช้ในการสนับสนุนของ Graz University เป็นเรื่องที่สำคัญ NX ช่วยให้สามารถรู้จำนวน Parts ที่เกี่ยวข้องกัน และปรับเปลี่ยนข้อมูลให้ถูกต้องเมื่อมีการเปลี่ยนแปลงของการออกแบบ ซึ่งเป็นเรื่องที่สำคัญอย่างยิ่งเนื่องด้วยทีมต้องสามารถวิเคราะห์ทางเลือกหลายๆทางจนกระทั่งได้ทางเลือกที่เป็นไปได้ภายใต้งบประมาญที่มีให้ ซึ่งผลที่ได้ก็เป็นที่น่าพอใจ เนื่องจากทีมสามารถออกแบบได้มีคุณภาพที่ดีขึ้นแล้วยังใช้เวลาน้อยลงกว่าเดิม ทำให้มีเวลาในการเปรียบเทียบทางเลือกในการออกแบบมากกว่าเดิม
การใช้ NX ในการออกแบบหุ่นยนต์รุ่นที่ 3 ช่วยเพิ่มโอกาสในการคว้าชัยชนะในการแข่งขัน และยังช่วยให้สามารถออกแบบหุ่นยนต์อัตโนมัติที่สามารถทำงานด้านอื่นๆนอกจากการเล่นฟุตบอลได้
สรุปความจากบทความ “Graz University of Technology” จาก Siemens PLM